General information about the Fly CAN Hat
Overview
The Fly Can Hat board was made to perform the same functions as the UTOC board, allowing the Fly-Pi/Fly-Gemini V1.1/V2.0 to directly connect to CAN bus boards for Can communication.
- Compatilbe Boards
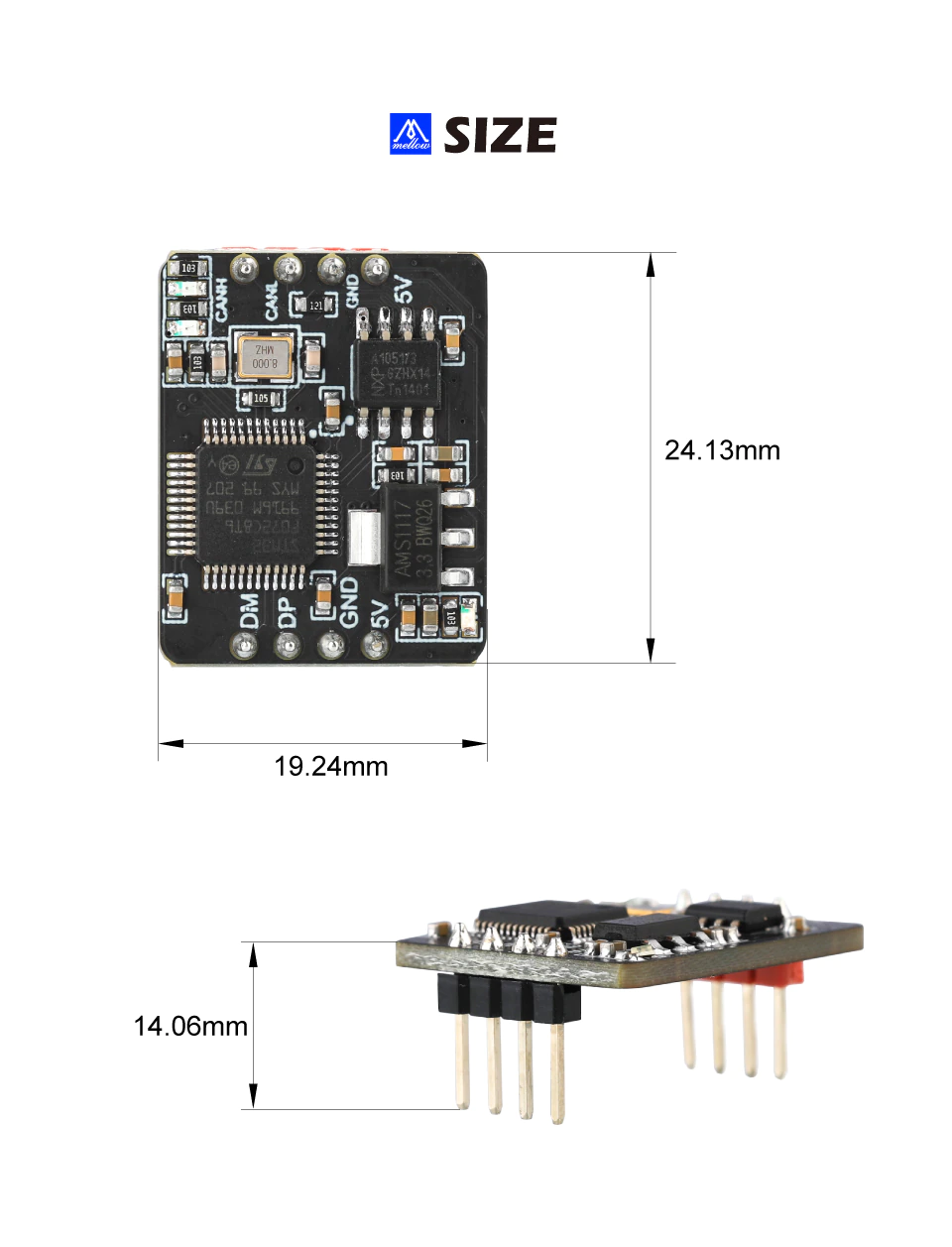
Dimensions
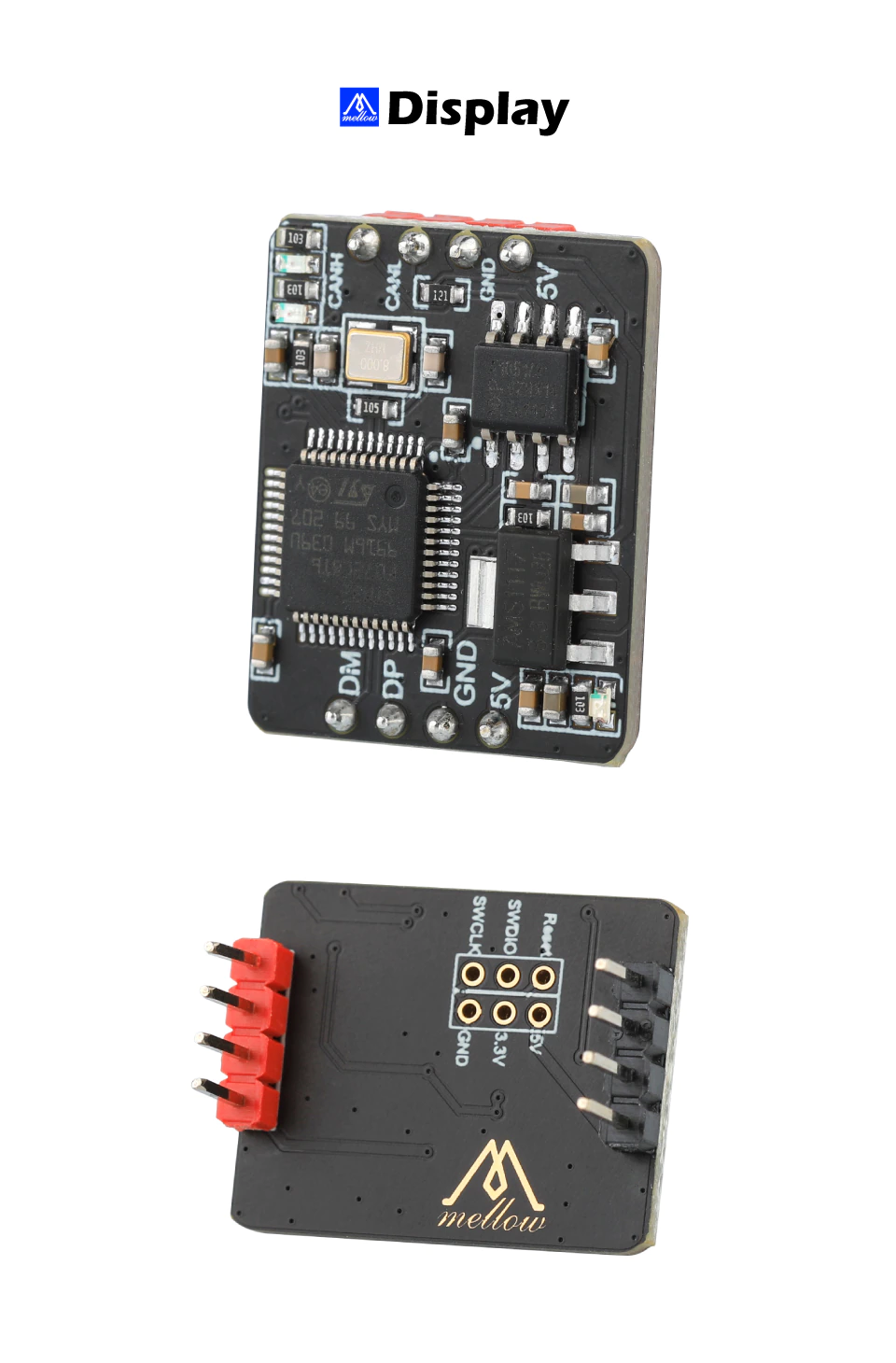
Top and Bottom View
Installation
-
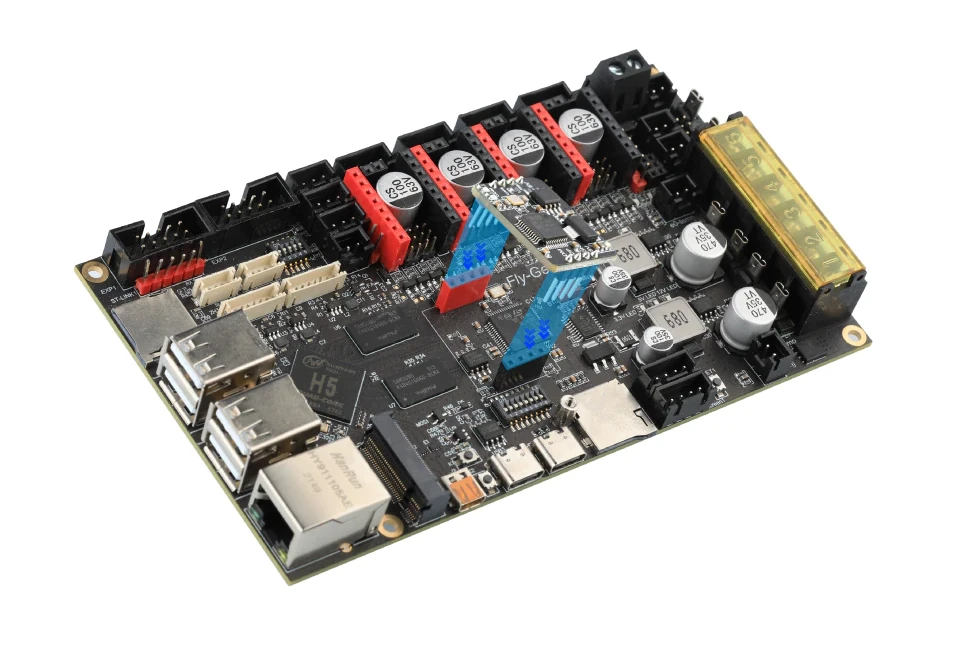
On Gemini align the Red pin header on the Can Hat with the red socket on the main board. The black pin header should align to the black socket.
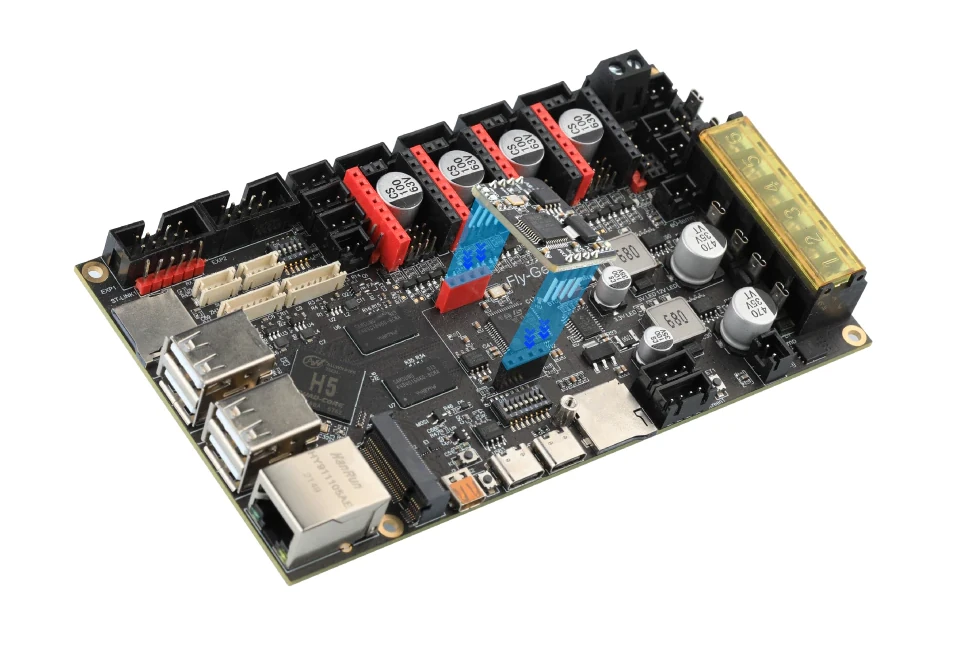
Gemini CAN Hat installation -
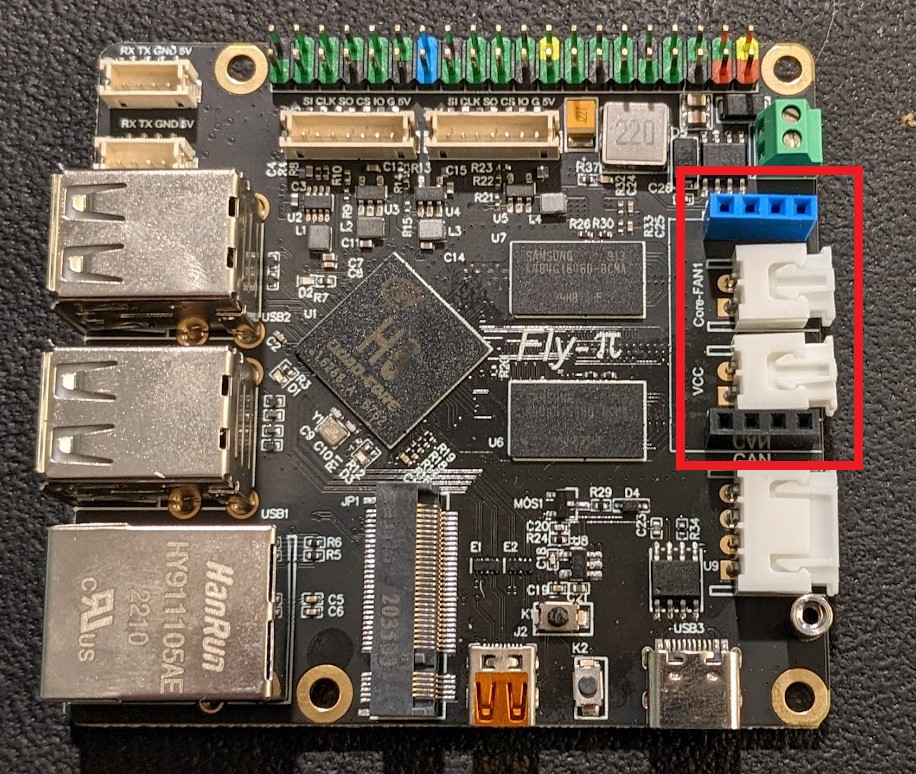
On the Fly Pi align the Red pin header on the Can Hat with the blue socket on the main board. The black pin header should align to the black socket.
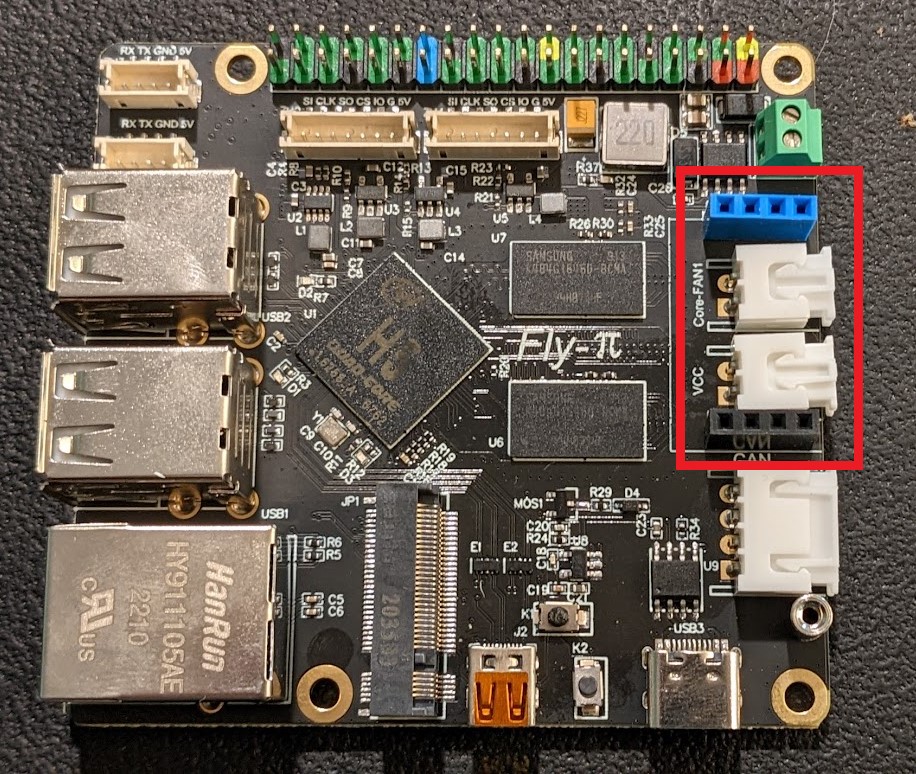
Fly_Pi CAN bus headers
Klipper Host CAN0 file configuration
The Fly OS operating system ships with a CAN0 file pre configured. You only need to edit the file if you want to use a bus speed other than 5000000.
- SSH to your Klipper host and create a new can0 file in the /ect/network/interfaces.d folder
sudo nano /etc/network/interfaces.d/can0
- Enter the following information.
allow-hotplug can0
iface can0 can static
bitrate 500000
up ifconfig $IFACE txqueuelen 1024
pre-up ip link set can0 type can bitrate 500000
pre-up ip link set can0 txqueuelen 1024
-
enter Ctrl+X to save the can0 file
-
Reboot your klipper host.
-
This should be all you need to do if you are using a Fly UTOC-1, UTOC-3 or Mellow CANhat for the Gemini and Fly Pi. Other CAN bus adapters may need aditional configuration steps.